|
||||||
| TECNICA | ||||||
|
||||||
 Come
i vettori spaziali veri, anche i modelli spaziali possono avere più
stadi. Questa configurazione permette di raggiungere grandi altezze e
velocità molto elevate, oltre ad essere affascinate da progettare,
costruire e veder volare. Come
i vettori spaziali veri, anche i modelli spaziali possono avere più
stadi. Questa configurazione permette di raggiungere grandi altezze e
velocità molto elevate, oltre ad essere affascinate da progettare,
costruire e veder volare.Il concetto a cui si ispira questo sistema è l'aumento della durata della spinta liberandosi di peso superfluo durante il volo. Un modello a più stadi decolla come uno ad uno stadio solo, ma durante il tragitto espelle gli stadi inferiori ed i loro motori esauriti, accelerando sempre di più. Il distacco degli stadi avviene proprio nel momento di massima velocità quindi lo stadio superiore somma la sua accelerazione a quella già impressa e può raggiungere quote molto elevate. E' il sistema applicato, per esempio, nel vettore Saturn V.  Un
altro tipo di modelli pluristadio sono detti "in parallelo". In
questo caso vengono applicati due "booster" ai lati del corpo
principale, e tutti i motori partono simultaneamente. I booster aiutano
il decollo ed impartiscono una grande spinta iniziale, e vengono espulsi
al termine della loro combustione. Il motore principale ha una durata
maggiore e continua a spingere in alto il modello sfruttando anche la
maggiore velocità guadagnata al decollo. Questo sistema è
impiegato, per esempio, nello Space Shuttle e nell'Ariane V. Un
altro tipo di modelli pluristadio sono detti "in parallelo". In
questo caso vengono applicati due "booster" ai lati del corpo
principale, e tutti i motori partono simultaneamente. I booster aiutano
il decollo ed impartiscono una grande spinta iniziale, e vengono espulsi
al termine della loro combustione. Il motore principale ha una durata
maggiore e continua a spingere in alto il modello sfruttando anche la
maggiore velocità guadagnata al decollo. Questo sistema è
impiegato, per esempio, nello Space Shuttle e nell'Ariane V. Nei modelli si possono riprodurre entrambi i sistemi, applicando tecniche diverse a seconda delle dimensioni e del tipo di motori che si utilizzano. Naturalmente sono possibili soluzioni miste serie-parallelo, come per esempio l'Ariane 42 o 44. Di norma gli stadi sono due, ma possono essere anche tre. Non si supera questo numero sia per lo sforzo sulla struttura, sia per la difficoltà progressiva nell'ottenere accensioni perfette, sia per le altezze che diventano davvero eccessive e pongono seri problemi per il recupero degli stadi superiori.
Le tecniche sono completamente diverse per i modelli con motori tradizionali (tipo Estes) e per quelli con motori compositi (tipo Aerotech). Modelli con motori tradizionali. Nei modelli più piccoli, che utilizzano motori fino alla classe D oppure E a combustibile tradizionale, questi problemi vengono risolti in modo molto semplice dagli stessi motori utilizzati.
I due motori vengono tenuti assieme da un giro di nastro adesivo in cellophane, del tipo comune trasparente, che li trattiene fino al momento in cui il motore dello stadio superiore si accende. L'aumento di pressione provoca la rottura del nastro e il distacco degli stadi. In un modello pluristadio, l'ultimo stadio si muove
ad una grande velocità. In questo caso è necessario che il delay (ritardo)
sia più lungo del solito, per lasciare che il modello esaurisca la sua
velocità e il paracadute esca all'apogeo e non prima. Se il ritardo
fosse troppo breve il paracadute si aprirebbe mentre il modello viaggia
ancora molto veloce e si strapperebbe sicuramente.
Alcuni consigli Nel caso di modelli con diametro superiore a quello dei motori, un suggerimento per la realizzazione si può vedere nella figura 4
Quanto detto sopra vale quando i motori possono essere posti a contatto. Nel caso di riproduzioni in scala di modelli a più stadi, i motori possono essere distanti l'uno dall'altro. Il sistema di accensione funziona lo stesso se la distanza non supera i 15-20 centimetri, ma è necessario un accorgimento. Bisogna praticare due fori diametralmente opposti alla sommità dello stadio inferiore, poco sotto il punto di collegamento con lo stadio supriore. Questi fori di sfiato permettono all'aria fresca contenuta nella parte di tubo sopra il motore dello stadio inferiore di essere espulsa dai gas caldi che in questo modo possono raggiungere liberamente il motore superiore. Se non si facesse così, i gas caldi comprimerebbero l'aria fresca senza raggiungere il motore superiore, provocando il distacco degli stadi senza accensione dello stadio superiore. Quando si progettano modelli a più stadi bisogna ricordare che il peso dei vari motori è concentrato tutto nella parte inferiore del modello. Questo può provocare una posizione del Centro di Gravità troppo arretrata e quindi instabilità (vedi Stabilità). Tenete in considerazione questo aspetto quando vi accingerte a progettare un modello di questo tipo.
Le descrizioni seguenti valgono per tutti i modelli che utilizzano motori compositi, sia mid power che high power. Il primo stadio viene acceso come un modello ad uno stadio solo. Al termine della combustione del primo stadio un dispositivo elettronico deve occuparsi di separare gli stadi (soluzione adottata in modelli di dimensioni maggiori) o di accendere direttamente il secondo stadio, ed un altro dispositivo deve azionare il paracadute del primo stadio. Il secondo stadio prosegue il suo volo e viene recuperato come di solito. Va detto che a causa delle grandi quote che possono ragiungere i pluristadi, il sistema di recupero del secondo normalmente è di tipo "dual recovery" (vedi Recupero). La soluzione di affidare la separazione dei due stadi all'accensione del motore del secondo stadio non è tra le migliori. In questi modelli non si può semplicemente scalare verso l'alto le soluzioni "tipo Estes", l'accensione del secondo stadio rischia di rovinare parecchio il primo stadio anche se si possono trovare soluzioni per proteggerlo. La soluzione ideale resta la separazione dei due stadi provocata da una carica di espulsione, e l'accensoine successiva del motore del secondo stadio. E' una soluzione professionale, adottata anche nei missili veri. I dispositivi usati per l'accensione del secondo stadio sono: Timer - Accende il secondo stadio dopo una tempo
prefissato e calcolato sulla base delle caratteristiche del motore.
I timers si mettono in azione tramite un interruttore ad accelerazione
(G-switch) o tramite l'apertura di un contatto al decollo (breakwire).
Un timer a due canali puo' essere utilizzato anche per la separazione del
secondo stadio. Accelerometro - Questi dispositivi riconoscono
il momento in cui termina la combustione del motore dalla brusca decelerazione
che subisce il modello. In quell'istante inviano il comando di accensione
al motore dello stadio superiore. A volte sono combinati con un altimetro ed in questo
caso si possono usare sia per accendere lo stadio superiore che per
l'azionamento del suo sistema di recupero. I dispositivi utilizzati per l'azionamento del sistema di recupero del primo stadio sono: Carica di espulsione del motore - Si utilizza come in un modello a stadio singolo. Il ritardo del motore va scelto sulla base di una simulazione fatta al computer (vedi Software) perchè dopo la separazione lo stadio prosegue il volo per inerzia come qualunque modello. Timer - Aziona il sistema di recupero dopo un tempo prefissato dal decollo. In questo caso occorre un calcolo preciso del tempo, basato sulla curva di spinta del motore del primo stadio. Un timer a due canali può servire anche per la separazione dello stadio superiore. Altimetro - L'altimetro aziona il paracadute quando il primo stadio ha raggiunto la sua quota massima, come avviene anche in modelli monostadio. Se abbinato ad un accelerometro può venire usato anche per la separazione dello stadio superiore.
Scegliere il momento giusto per l'accensione del
secondo stadio. Bisogna esaminare la curva di spinta del motore
del primo stadio ed effettuare alcune simulazioni (vedi Software)
per determinare il momento giusto per l'accensione del secondo stadio.
Il momento migliore dipende dal tipo di motore scelto perchè
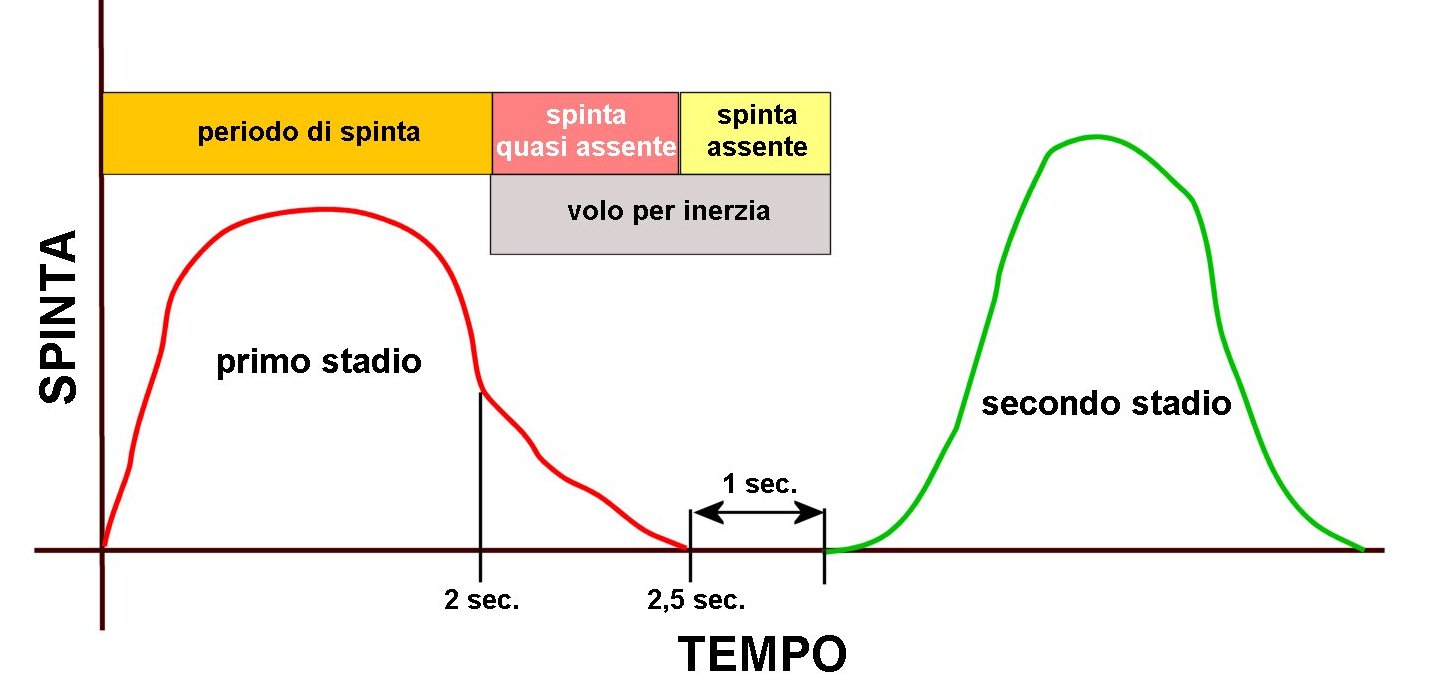
motori differenti hanno curve di spinta differenti. Poniamo che il motore del primo stadio abbia una durata di 2,5 sec. e la sua curva di spinta mostri una decisa diminuzione dela spinta dopo 2 sec. Se l'accensione del secondo stadio avvenisse al termine della combustione del primo (ovvero dopo 2,5 secondi dal decollo) il modello potrebbe proseguire per inerzia per un altro secondo prima che il motore del secondo stadio si accenda. Se aggiungiamo il mezzo secondo di spinta poco significativa vediamo che il modello per un secondo e mezzo vola pressochè senza spinta e durante questo tempo potrebbe rallentare ed inclinarsi ponendosi orizzontale o peggio col muso verso terra.
In questo esempio il momento giusto dell'accensione del secondo stadio è dopo 1 o 1,5 secondi dall'accensione del primo stadio, tempo che permette al motore del secondo di accendersi completamente giusto al momento in cui la spinta del primo cessa di essere significativa. Questo risultato si può ottenere con l'uso di un timer che inizi a contare dal momento del decollo.
Un problema che si deve affronatare se si decide di accendere
il motore del secondo stadio prima della separazione dei due, è
il danno al primo stadio provocato dallo scarico del motore superiore.
Dobbiamo sempre ricordarci che i nostri modelli sono fatti per essere
riutilzzati più volte, mentre i vettori veri sono quasi sempre usa-e-getta.
Questo problema può essere risolto , per esempio, inserendo un pezzo di tubo nell'accoppiatore che unisce i due stadi, senza incollarlo. In questo modo si rovinerà solo questo pezzo di tubo che può essere sostituito. Accensione del secondo stadio. Per l'accensione
del secondo stadio vengono usati dispositivi elettronici come timers
o accelerometri azionati da un interruttore ad accelerazione (G-switch)
che rileva il momento del decollo, che a loro volta comandano un accenditore
a basso assorbimento. Il sistema più giusto per accendere il motore
del secondo stadio dipende dal tipo di motore utilizzato. Alcuni motori
si accendono rapidamente, altri impiegano un tempo maggiore o si accendono
con maggiore difficoltà. Alcuni motori di grandi dimensioni (75
e 98mm) hanno un foro centrale molto grande che richiede accenditori
modificati tramite l'aggiunta di un pirogeno extra. L'accenditore di un motore con foro centrale di diametro piccolo di solito ha dei fili sufficientemente rigidi per tenerlo in posizione. Un accenditore con fili lunghi in motori di maggior diametro (per esempio un J570 Aerotech) può crollare sotto il suo peso. L'accenditore può essere tenuto al suo posto mediante dei fili robusti di materiale combustibile che al momento dell'accensiane bruceranno e permetteranno al motore di espellere i resti dell'accenditore. Il filo si lega appena sotto la testa dell'accenditore e va fissato tra il blocco di combustibile superiore e la rondella superiore (motori Aerotech). In questo modo l'accenditore rimarrà al suo posto in cima al motore finchè questo non si accende. A quel punto il filo brucia e l'accenditore viene espulso. Accendirtori per motori di grandi dimensioni hanno una massa sufficiente per comprimere i loro fili durante la fase di spinta, facendoli ammassare verso l'ugello. Se questo accade, l'ugello viene ostruito ed il motore può rompersi all'accensione a causa della sovrapressione. Un altro metodo utilizzato per tenere l'acenditore al suo posto, se il diametro del foro centrale e quello dell'ugello lo consentono, è di utilizzare un sottile bastoncino di legno (3 mm) al quale si fissa l'accenditore con un po' di nastro adesivo. Il bastoncino resta al suo posto perchè è appoggiato contro l'accoppiatore dei due stadi. Se l'accensione avviene dopo la separazione dei due stadi il bastoncino deve essere tenuto al suo posto nel motore del secondo stadio tramite nastro da carrozzieri. All'accensione il nastro brucia e ciò che resta del bastoncino e dell'accenditore vengono espulsi. Test di un nuovo progetto. La prima volta che lanciate un modello pluristadio con motori compositi è una buona idea usare solo il motore del booster, installando nel secondo stadio il motore previsto ma senza installare l'accenditore. Questo vi permetterà di capire se i sistemi funzionano, se la separazione degli stadi funziona, se il modello vola dritto. Ovviamente il secondo stadio deve utilizzare un altimetro per il recupero. I pluristadi hanno spesso la tendenza a percorrere una traiettoria incurvata a causa di un non perfetto allineamento tra gli stadi. Il modello deve volare perfettamente diritto anche solo col motore del booster. Se non fosse così sarete in condizione di sistemarlo prima di effettuare un volo bistadio. Scelta dei motori. Una buona scelta è utilizzare dei motori di rapida accensione per lo stadio superiore, come tutti i Blue Thunder dell'Aerotech o i Pro38 (o Pro54) prodotti da CTI. In questo modo l'accensione è più sicura e il tempo che intercorre tra l'attivazione dell'accenditore e la reale accensione del motore è molto breve. |
||||||
 Esistono
infatti motori adatti esclusivamente per primi stadi che non hanno ne'
carica di ritardo ne' carica di espulsione (Fig.1), perciò la loro sigla
termina con -0 (per es. D12-0). Quando il combustibile di questi motori
sta per terminare la combustione, i gas sfondano la sottile parete di
combustibile ancora incombusto e le particelle di combustibile acceso
raggiungono il motore superiore e lo accendono (fig. 2 e fig. 3). L'accensione
provoca il distacco dello stadio inferiore che essendo piccolo e leggero
e con grandi stabilizzatori, cade roteando lentamente e arriva a terra
senza danni.
Esistono
infatti motori adatti esclusivamente per primi stadi che non hanno ne'
carica di ritardo ne' carica di espulsione (Fig.1), perciò la loro sigla
termina con -0 (per es. D12-0). Quando il combustibile di questi motori
sta per terminare la combustione, i gas sfondano la sottile parete di
combustibile ancora incombusto e le particelle di combustibile acceso
raggiungono il motore superiore e lo accendono (fig. 2 e fig. 3). L'accensione
provoca il distacco dello stadio inferiore che essendo piccolo e leggero
e con grandi stabilizzatori, cade roteando lentamente e arriva a terra
senza danni.
 Nei
pluristadi in parallelo l'accensione dei motori avviene contemporaneamente
a terra, e le problematiche sono le stesse dei
Nei
pluristadi in parallelo l'accensione dei motori avviene contemporaneamente
a terra, e le problematiche sono le stesse dei 

 Sono
rari gli esempi di modelli a stadi paralleli, o booster, nel campo dell'High
Power. In questi modelli la problematiche non sono molto diverse da
quelle dei missili veri, e le soluzioni tendono ad assomigliare a questi.
Ci sono esempi di collegamenti pirotecnici che vengono spezzati da una
piccola carica, oppure sistemi di sgancio comandati da servocomandi
di tipo modellistico, come questi agganci per i booster del modello
di Ariane 44LP svizzero
Sono
rari gli esempi di modelli a stadi paralleli, o booster, nel campo dell'High
Power. In questi modelli la problematiche non sono molto diverse da
quelle dei missili veri, e le soluzioni tendono ad assomigliare a questi.
Ci sono esempi di collegamenti pirotecnici che vengono spezzati da una
piccola carica, oppure sistemi di sgancio comandati da servocomandi
di tipo modellistico, come questi agganci per i booster del modello
di Ariane 44LP svizzero